强化学习分类
-
策略梯度算法
- 直接用神经网络表示策略
- 神经网络输出N维的向量,每一维表示选择该动作的概率大小
=[P_{action1},P_{action2},P_{action3},...])
-
值函数算法
- 用神经网络拟合Q或者V函数
- 得到Q之后,利用贪婪策略等选择下一步动作
=Q) 或者
或者=V)
-
Actor-Critic
策略梯度算法优缺点
-
优点
- 更好的收敛性
- 有效处理高维和连续的动作空间
- 能够学到随机策略
- 不会导致策略退化
-
缺点
- 容易陷入局部最优
- 难以评价一个策略,评价结果方差很大
策略退化
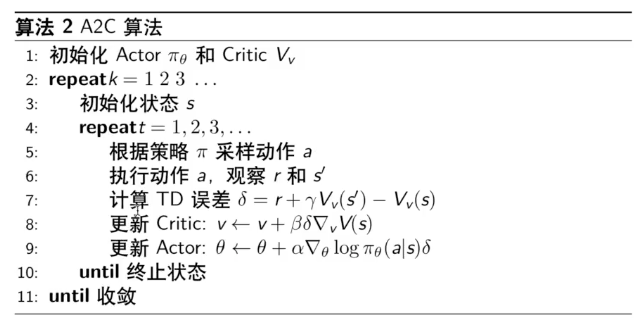
我们从经典的A2C算法入手讲解策略梯度算法
优化目标
=max\sum_{\tau }P(\tau |\theta )R(\tau ))
- 其中,
 表示策略网络的参数;
表示策略网络的参数; 表示一段状态转移轨迹;
表示一段状态转移轨迹; ) 表示该轨迹的最终回报值;
表示该轨迹的最终回报值;) 表示当策略网络的参数为时,出现的概率大小。
表示当策略网络的参数为时,出现的概率大小。
- 在一个固定的环境再,一般来说,是稳定不变的。
优化方法
-
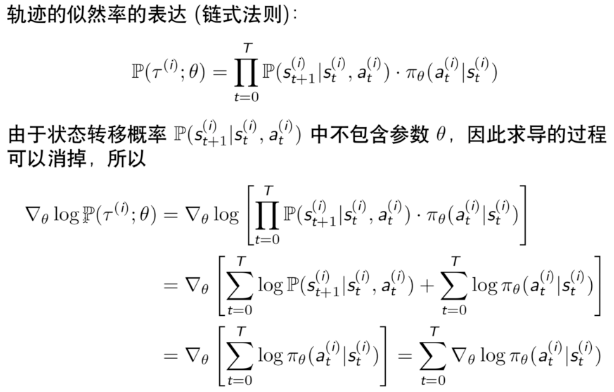
梯度表达式
-
似然率角度梯度求解
-
似然率梯度的理解
}{\partial \theta }) 是轨迹的出现概率随变化最陡的方向。
是轨迹的出现概率随变化最陡的方向。
- 沿正方向,轨迹出现的概率会变大
- 沿负方向,轨迹出现的概率会变小
) 控制了参数更新的方向和步长,R是正的,就让轨迹出现的概率变大,并且R越大,步长的幅度越大;相反亦然。
控制了参数更新的方向和步长,R是正的,就让轨迹出现的概率变大,并且R越大,步长的幅度越大;相反亦然。- 最终增大了高回报率轨迹出现的概率,减少了低回报率轨迹出现的概率
-
轨迹分解到状态
-
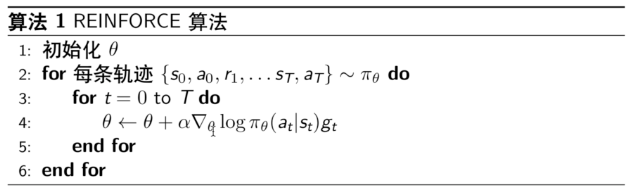
算法流程
Actor-Critic
- 上面的reinforce算法中,
 的方差非常大,为了减小方差,我们引入了Critic函数
的方差非常大,为了减小方差,我们引入了Critic函数\approx \sum_{t=k}^{T}\gamma ^{t-k}R(s_{k},a_{k})) 代替
代替
- 再进一步,由于每个Q都是正的,会导致网络对于任何轨迹都想提高其出现的概率,因此,引入一个基线。基线的选择为当前状态的V值。由此得到一个优势函数:
=Q^{\pi _{\theta }}(s,a)-V^{\pi _{\theta }}(s))
- 上面的方法需要设计一个Q函数一个V函数,为了简化,我们直接用TD误差代替优势函数。TD误差为:
-V^{\pi _{\theta }}(s)) 其中,
其中, 是
是 的后一个状态
的后一个状态
总结

- 其中,Advantage Actor-Critic又叫A2C,由于TD Actor-Critic是Advantage Actor-Critic的无偏估计,所以实际在使用A2C的时候,都是用的TD Actor-Critic
- A2C需要多进程来打破训练数据之间的相关性
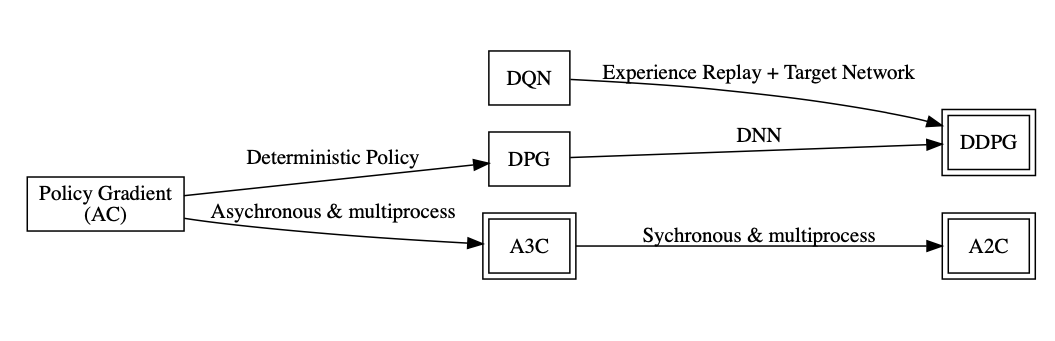
其他策略梯度算法简单介绍
-
确定性梯度策略算法DPG
-
特性
- 直接采用确定性动作输出:
)
- 可以用于高维和连续动作的情况
- 常规的策略梯度方法无法用到高维和连续动作空间
-
梯度求解
- 过去一直认为无模型情况下确定性策略梯度不存在
- DPG证明了梯度存在,并建立了其与Q函数的关系

-
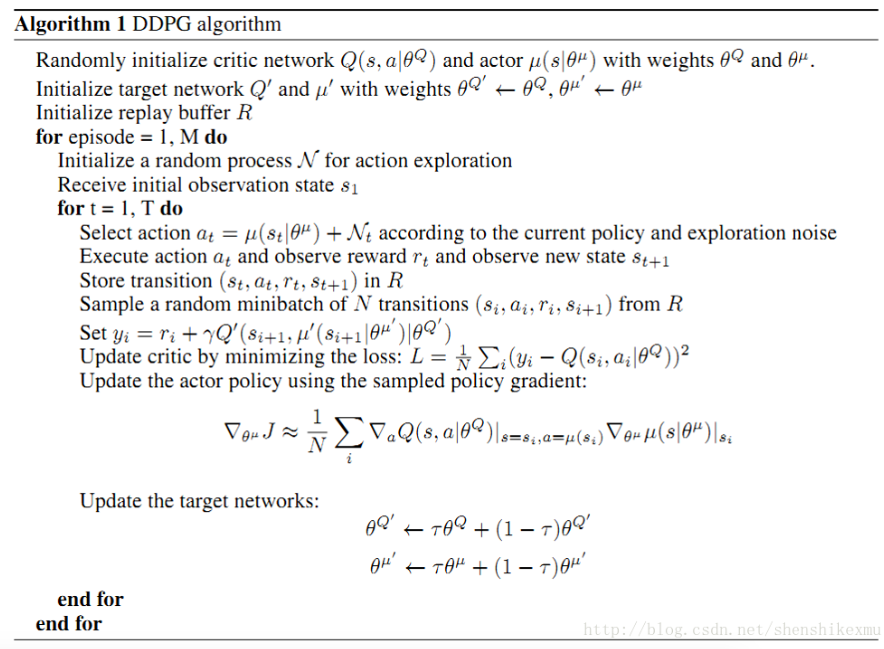
DDPG
-
核心思路
- Continuous Control with Deep Reinforcement Learning (ICRL2016)
- 结合了 DQN 和 DPG
- 利用随机过程产生探索性动作

-
算法流程
-
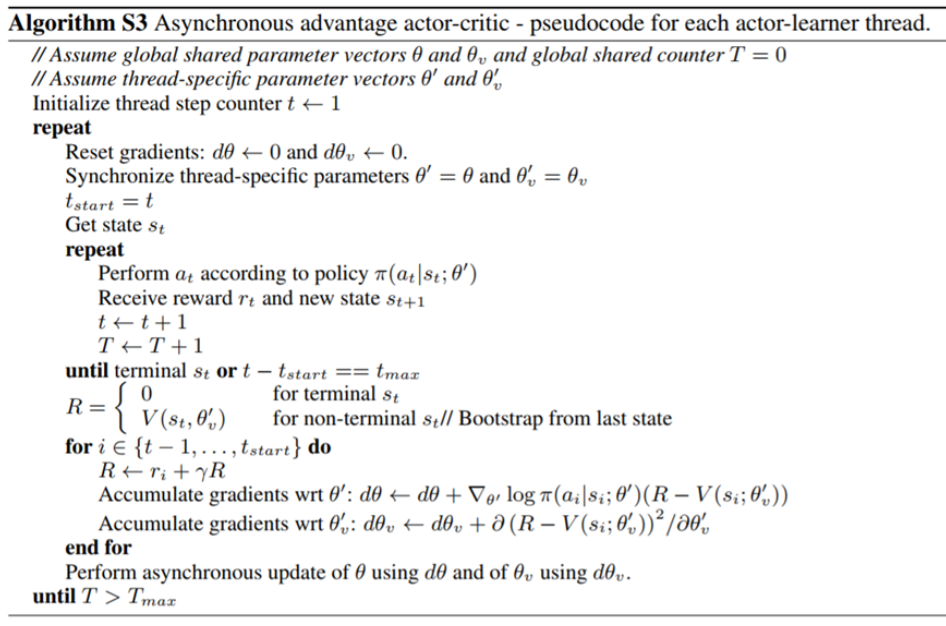
A3C
-
论文来源
- Asynchronous Methods for Deep Reinforcement Learning (ICML2016)
-
问题提出
- Online 的算法和 DNN 结合后不稳定 (样本关联性)
-
解决方案
- 创建多个agent,在多个环境中执行异步学习构建batch(多线程)
- 来自不同环境的样本无相关性
- 不依赖于 GPU 和大型分布式系统
- 不同线程使用了不同的探索策略,增加了探索量
-
算法流程
-
A2C
-
来源
- OpenAI对A3C进行了改进,把异步变成了同步,等所有线程的动作执行完毕得到reward后一起拿来更新,可以用GPU完成该动作,效率高
- 当batch_size较大时效果好
策略梯度知识图谱
扩展(其他策略梯度算法)
- 自然梯度法:寻找策略更新最快的方向
- 信赖域策略优化算法(TRPO):研究了更新步长的选择,步长选择在策略梯度中非常重要,但实现非常复杂
- 近端策略优化(PPO):对TRPO的改进,使实现非常简单,实际使用中,效果比较好甚至最好的方案