前言
- 强化学习可以分为有模型和无模型的方法两大类
- 未知模型
- 学习法
- 通过智能体的交互,学习值函数和策略
- 代表方法:MC,TD
- 已知模型
- 规划法
- 无需智能体交互,直接从模型学习最优策略
- 代表方法:DP
基于模型的强化学习
核心思路
- 通过经验,学习出一个虚拟的环境模型
- 利用学到的环境模型,进行动态规划,计算价值函数或者策略
优势
- 可以通过监督学习,有效地学习环境模型
- 可以将学到的环境模型放在GPU内,快速得到大量的交互信息
- 没有任何真实损失
- 直接利用环境模型的不确定性
劣势
- 先学环境模型,再学值函数,存在两次近似误差 -> 累计误差
Dyna-q
- 算法流程
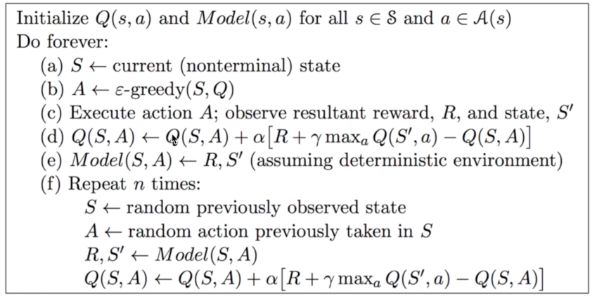
- repeat n times的部分实际上是在用学习到的虚拟环境模型进行学习,这一部分可以新开一个线程,和外面真实的环境交互分开。
- 真实的环境交互1秒一次,而计算机中虚拟的环境交互0.1秒一次,那这里的n就是10。
蒙特卡洛树搜索Monte-Carlo Tree Search
-
特性
- 适用于Combinatorial Games
- Combinatorial Games特点:零和、完美信息、确定性、离散、序列化
-
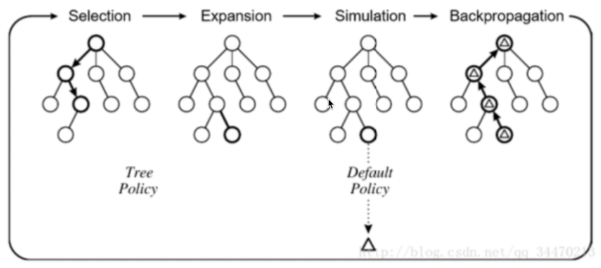
算法核心
- 在MCTS中,仿真策略需要策略提升
- 每次仿真有两个阶段
- 树策略(提升):选择动作,最大化Q(S, A)
- 默认策略(固定):快速计算到终止状态
- Repeat(每次仿真)
- 使用MC评价来估计Q(S, A)
- 提升树策略,比如epsilon-贪婪,UCB等
- 对仿真出来的经验做MC优化
- 搜索到最优的搜索树Q(S,A)->q*(S,A)
epsilon-贪婪对于非最优策略是均匀采样的 UCB既考虑了值函数,又考虑了探索的次数 = 回报值/仿真次数
-
优势
- Highly selective best-first search
- 动态评价状态
- 结合了采样去打破维度诅咒,用采样取代了暴力搜索
- 适合于各种黑盒模型,不需要满足马尔可夫性
- 计算有效,容易并行
-
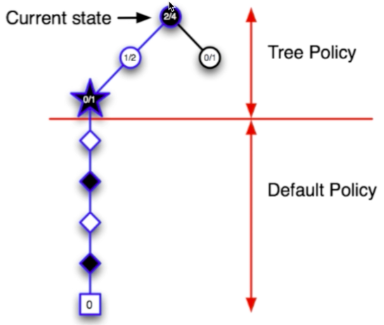
算法流程
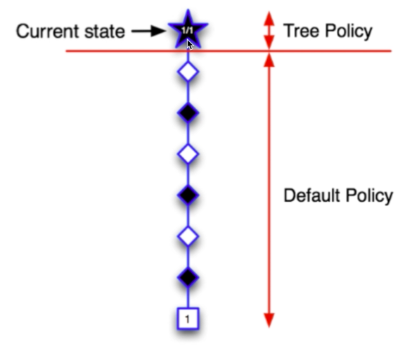
- 当前状态S1为叶子节点,直接从当前状态开始,用默认策略进行仿真
- 结果“赢了”
- 更新节点的UCB=获胜次数/仿真次数
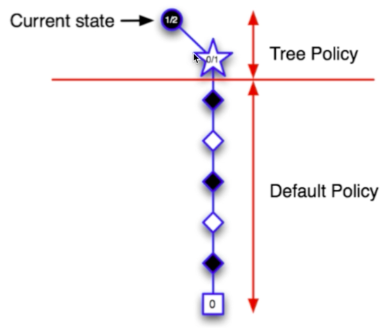
- 依据UCB规则选择一个动作向下走,每一个动作都对应了一个UCB
- UCB其实是一个值,与值函数正相关,与仿真次数负相关
- 但是目前仿真次数都是0,所以根据值函数选一个动作,到达S2
- 结果“输了”
- 更新树策略路径上的每个节点的UCB
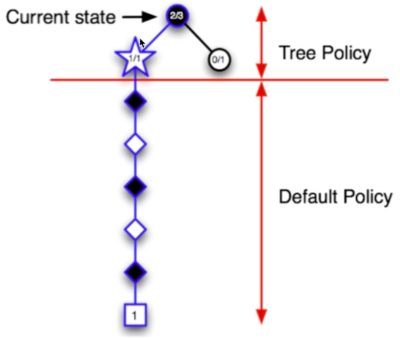
- 从S1开始,根据UCB选一个动作
- 由于第二步中,最终结果是“输了”,所以第二步中动作的UCB下降了,于是从S1重新选一个动作,到达S3
- 结果“赢了”
- 更新树策略路径上的每个节点的UCB
- 再从S1开始搜索,搜到S3后,再选一个动作,到达S4
- 结果“输了”
- 更新树策略路径上的每个节点的UCB
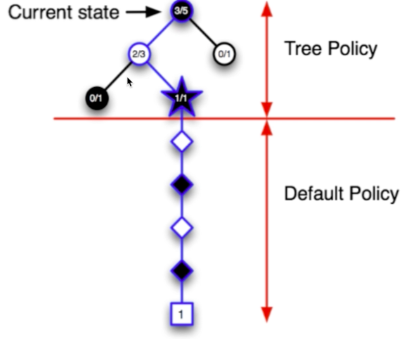
- 再从S1开始搜索,搜到S3后,没有去S4(因为S4刚刚输了,UCB下降),再选一个动作,到达S5
- 结果“赢了”
- 更新树策略路径上的每个节点的UCB
-
后面的步骤依次类推
TD搜索
-
算法特性
- 有些情况下,没有终止状态,MC方法不适用
- 将MCTS中的MC评价换成TD评价
-
算法流程
- 从当前状态St开始采样片段
- 估计Q(s, a)
- 对于每一步的仿真,使用Sarsa方法更新Q函数
- 基于Q(s, a)选择动作
