#include <Eigen/Eigen>
#include <assert.h>
#include <cmath>
#include <iostream>
#include <tuple>
#include <typeinfo>
#include <vector>
int MaxId(const Eigen::VectorXd &h) {
int max_id = -1;
int id = 0;
double max_ele = std::numeric_limits<double>::lowest();
while (id < h.rows() - 1) {
double ele = std::abs(h(id));
if (ele > max_ele) {
max_ele = ele;
max_id = id;
}
id++;
}
assert(max_id >= 0);
return max_id;
}
double sign(double c) {
if (c >= 0.0) {
return 1.0;
}
return -1.0;
}
struct Constrains {
Constrains(int dim) {
A = Eigen::MatrixXd::Zero(0, dim);
b = Eigen::VectorXd::Zero(0);
}
Constrains(const Eigen::MatrixXd &_A, const Eigen::VectorXd &_b) {
assert(A.rows() == b.rows());
A = _A;
b = _b;
}
int dim() const { return A.cols(); }
int size() const { return A.rows(); }
void insert(const Eigen::VectorXd &_A, const double _b) {
A.conservativeResize(A.rows() + 1, A.cols());
A.row(A.rows() - 1) = _A;
b.conservativeResize(b.rows() + 1);
b(b.rows() - 1) = _b;
}
Eigen::MatrixXd A;
Eigen::VectorXd b;
};
bool OneDimMinNorm(const Constrains &H, Eigen::VectorXd *y) {
assert(H.A.cols() == 1);
double low = std::numeric_limits<double>::lowest();
double up = std::numeric_limits<double>::max();
for (int i = 0; i < H.A.rows(); ++i) {
if (H.A(i, 0) > 0) {
up = std::min(up, H.b(i) / H.A(i, 0));
} else if (H.A(i, 0) < 0.0) {
low = std::max(low, H.b(i) / H.A(i, 0));
}
}
if (low > up) {
return false;
}
(*y)(0) = std::min(up, std::max(0.0, low));
return true;
}
std::tuple<Eigen::MatrixXd, Eigen::VectorXd, Constrains>
HouseholderProj(const Constrains &I, const Eigen::VectorXd &g, double f) {
int dim = g.rows();
// calcualte origin v
Eigen::VectorXd v(dim);
v = (f * g) / g.dot(g);
// calcualte orth basis M
int max_id = MaxId(g);
Eigen::MatrixXd e = Eigen::MatrixXd::Identity(dim, dim);
e(max_id, max_id) = (-sign(g(max_id)) * g.norm());
Eigen::VectorXd u = g - e.col(max_id);
Eigen::MatrixXd H = Eigen::MatrixXd::Identity(dim, dim) -
2.0 * u * u.transpose() / (u.dot(u));
Eigen::MatrixXd transformed_e = H.transpose() * e;
double dist = (transformed_e.col(max_id) - g).norm();
assert(dist <= 0.0000001);
Eigen::MatrixXd M(dim, dim - 1);
M << transformed_e.leftCols(max_id),
transformed_e.rightCols(dim - max_id - 1);
// calcualte H_dot
Constrains H_dot(I.A * M, I.b - I.A * v);
return std::make_tuple(M, v, H_dot);
}
bool InConstrain(const Eigen::VectorXd &A, const double b,
const Eigen::VectorXd &y) {
assert(A.rows() == y.rows());
return A.dot(y) <= b;
}
// H: {a.T * x <= b}
bool LowDimMinNorm(const Constrains &H, Eigen::VectorXd *y) {
*y = Eigen::VectorXd::Zero(H.dim());
if (H.size() == 0) {
return true;
}
if (H.dim() == 1) {
return OneDimMinNorm(H, y);
}
Constrains I(H.dim());
for (int j = 0; j < H.size(); ++j) {
if (!InConstrain(H.A.row(j), H.b(j), *y)) {
Eigen::MatrixXd M;
Eigen::VectorXd v;
Constrains H_dot(H.dim() - 1);
std::tie(M, v, H_dot) = HouseholderProj(I, H.A.row(j), H.b(j));
Eigen::VectorXd y_dot(H.dim() - 1);
if (!LowDimMinNorm(H_dot, &y_dot)) {
return false;
}
*y = M * y_dot + v;
}
I.insert(H.A.row(j), H.b(j));
}
return true;
}
int main() {
const int d = 3;
int m = 7;
Eigen::Matrix<double, 3, 3> Q;
Eigen::Matrix<double, 3, 1> c;
Eigen::Matrix<double, 3, 1> x; // decision variables
Eigen::Matrix<double, -1, 3> A(m, 3); // constraint matrix
Eigen::VectorXd b(m); // constraint bound
Q << 2.0, 1.0, 1.0, 1.0, 2.0, 1.0, 1.0, 1.0, 2.0;
c << 1.2, 2.5, -10.0;
A << 1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0, -0.7, 0.5, 0.0, 0.5, -1.0,
0.0, 0.0, 0.13, -1.0, 0.1, -3.0, -1.3;
b << 10.0, 10.0, 10.0, 1.7, -7.1, -3.31, 2.59;
// 将qp问题转化为min norm问题
Eigen::LLT<Eigen::Matrix<double, d, d>> llt(Q);
if (llt.info() != Eigen::Success) {
std::cout << "infinity\n";
return 0;
}
const Eigen::Matrix<double, -1, d> As =
llt.matrixU().template solve<Eigen::OnTheRight>(A);
const Eigen::Matrix<double, d, 1> v = llt.solve(c);
const Eigen::Matrix<double, -1, 1> bs = A * v + b;
// 求解min norm问题
Constrains H(As, bs);
Eigen::VectorXd z(H.dim());
if (LowDimMinNorm(H, &z)) {
llt.matrixU().template solveInPlace<Eigen::OnTheLeft>(z);
z -= v;
std::cout << "optimal sol: " << z.transpose() << std::endl;
std::cout << "minobj: " << 0.5 * (Q * z).dot(z) + c.dot(z) << std::endl;
std::cout << "cons precision: " << (A * z - b).maxCoeff() << std::endl;
} else {
std::cout << "infeasible\n";
}
return 0;
}
,其中,
严格正定。
,其中
是一个下三角矩阵
,原问题转化为
,其中
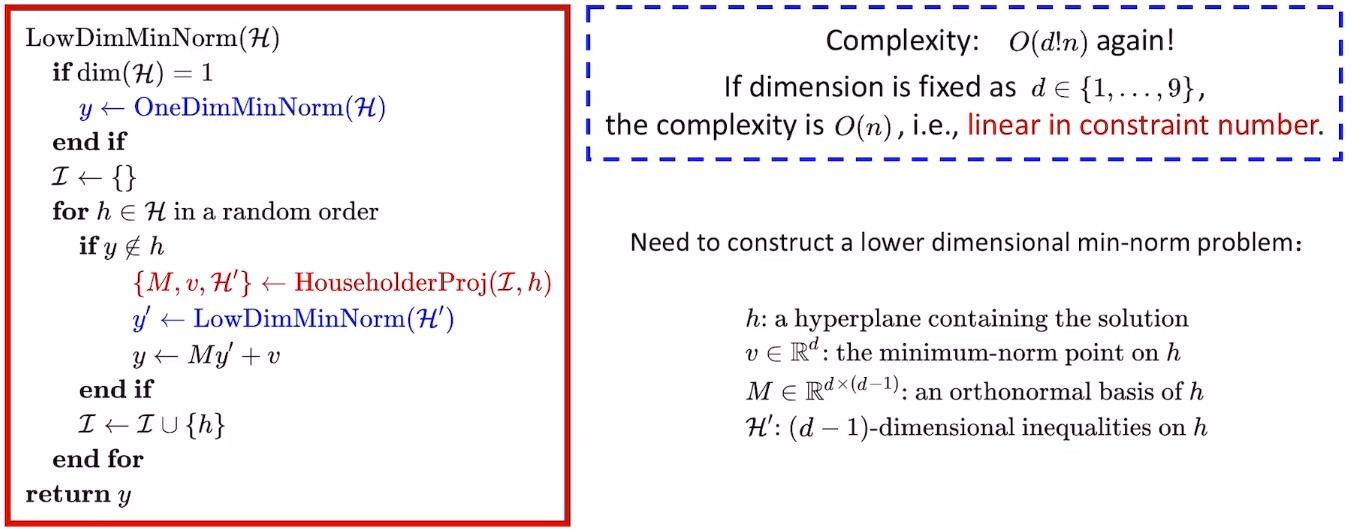
指的是
列的维度,当维度降低到1维的时候,就可以直接求结果
是
投影到
后的结果,满足
是原来的原点投影到
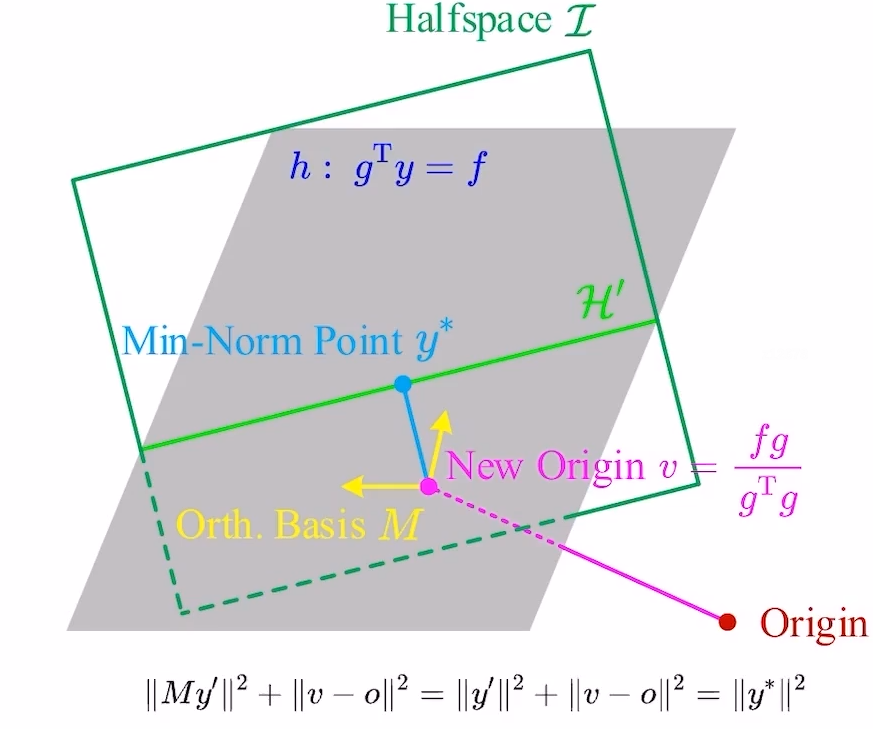
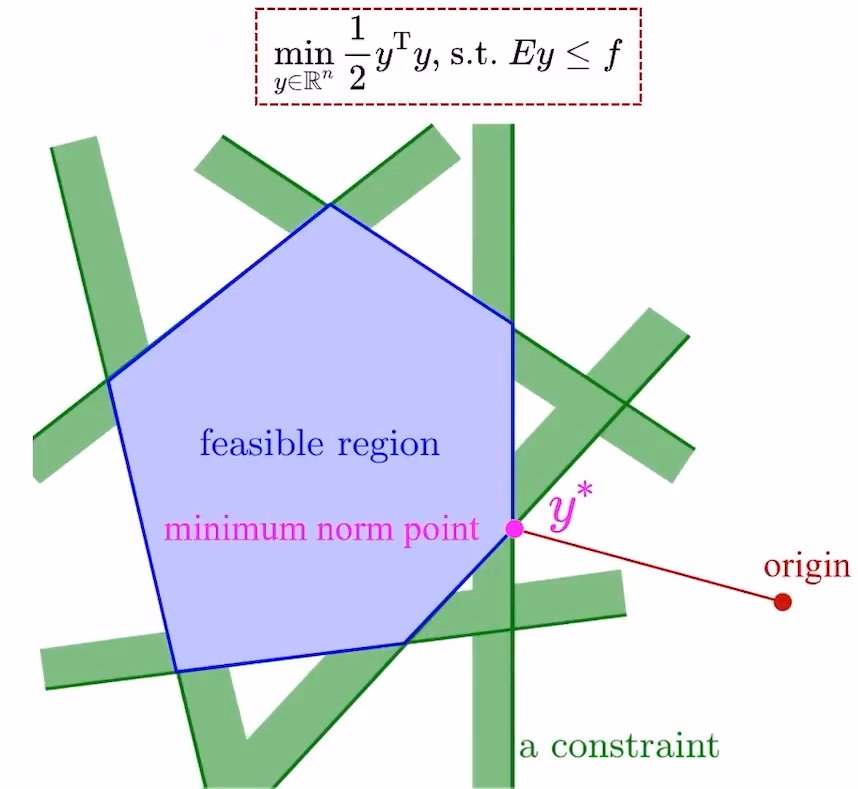
,最优解
一定在其表面上。同时,
组成的集合,其中
是
的向量,
是标量),都投影到
),
的向量,
为坐标轴新建一个N-1维的坐标系(这样做的意义是:在这个坐标系下的任何一个点,都在
,这里的
可以将N-1维空间里得到的解恢复到N维空间。
(这里的
等同于上面提到的
等同于
,现在我们构造一组N维的向量
,其中
表示一个第
,通过旋转
,使得其与
上,
则贴合于超平面
选择
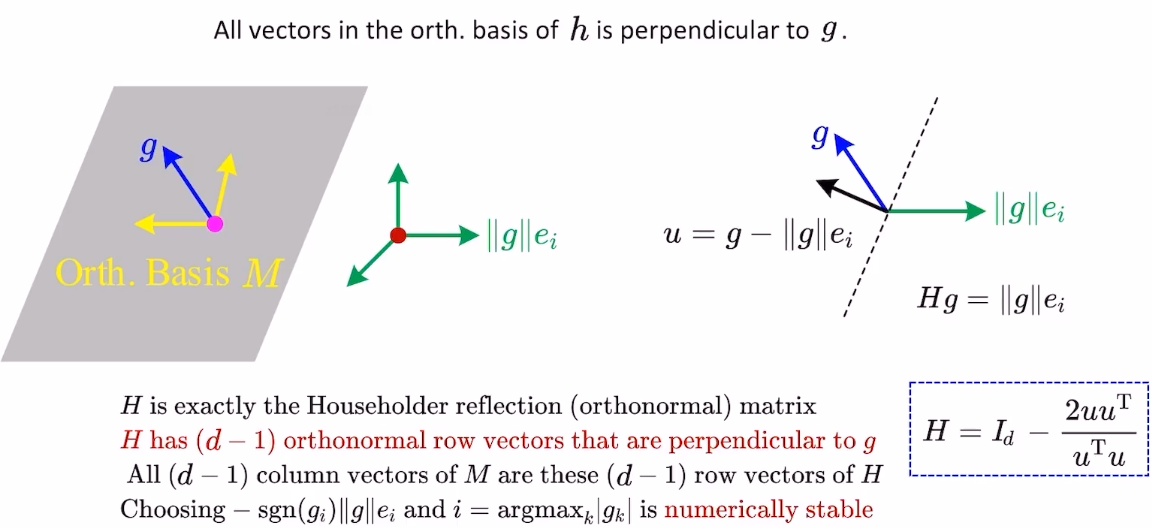
,
是约束的个数
