定理
- 对于问题
- $$min_{x}f(x)$$
- $$s.t. h_{i}(x)\leq0,i=1,…,m;l_{i}(x)=0,j=1,…,r$$
- 如果该问题不是degenerate,那么最优解满足如下条件
- stationarity: \(0\in\partial_{x}\left[f(x)+\sum_{i=1}^{m}u_{i}h_{i}(x)+\sum_{j=1}^{r}v_{i}l_{i}(x)\right]\)
- complementary slackness: \(u_{i}\cdot%20h_{i}=0,i=1,…,m\)
- primal feasibility: \(h_{i}(x)\leq0,l_{j}=0;i=1,…,m;j=1,…,r\)
- dual feasibility: \(u_{i}\geq0,i=1,…,m\)
用途
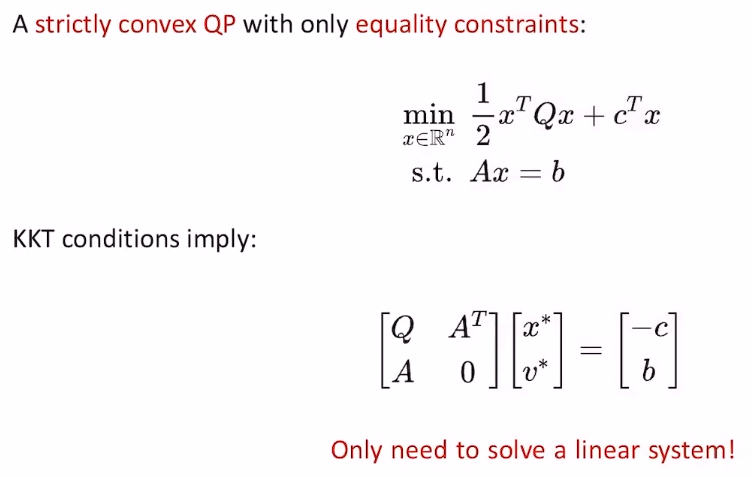
- 通过构造KKT条件,如果条件中没有不等式,那就有机会直接求解优化问题的解,比如下图这种情况,我们只需要求解下面的线性方程组的解即可得到优化结果
- 可以拿来度量约束优化数值算法的解的精度。下面三个值是KKT残差,通过取其中的最大值,使其足够小,就可以得到精度较高的解
- 不等式约束违背程度:\(max\lbrace h_{i},0\rbrace\)
- 等式约束违背程度:\( \left|l_{j}\right| \)
- 梯度残差:\( \left|\partial_{x}\left[f(x)+\sum_{i=1}^{m}u_{i}h_{i}(x)+\sum_{j=1}^{r}v_{i}l_{i}(x)\right]\right| \)